Recent Work
Ensemble Latent Space Roadmap for Improved Robustness in Visual Action Planning
Michael C. Welle*, Martina Lippi*, Andrea Gasparri, Danica Kragic
Abstract—
 Planning in learned latent spaces helps to decrease the dimensionality of raw observations.
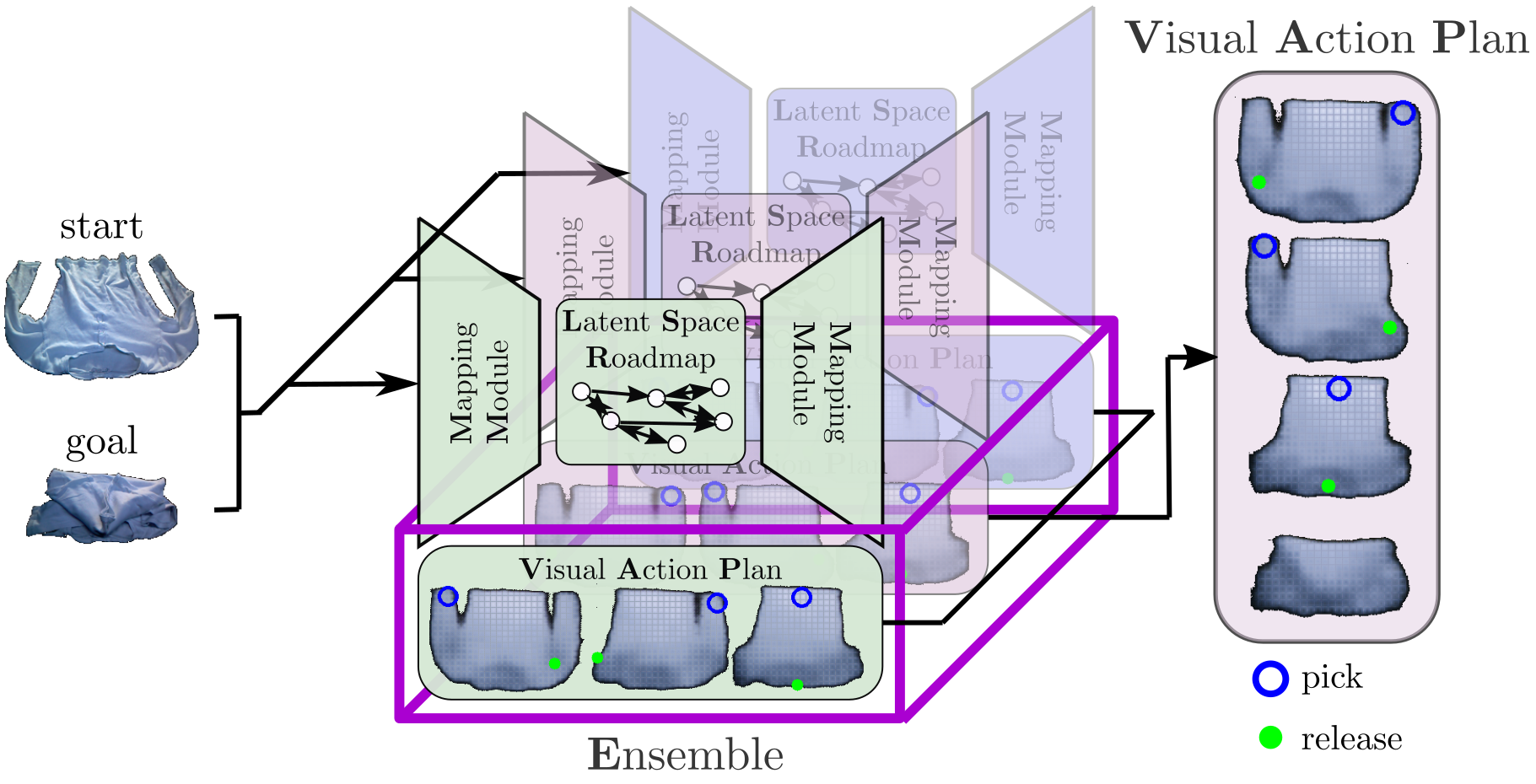
In this work, we propose to leverage the ensemble paradigm to
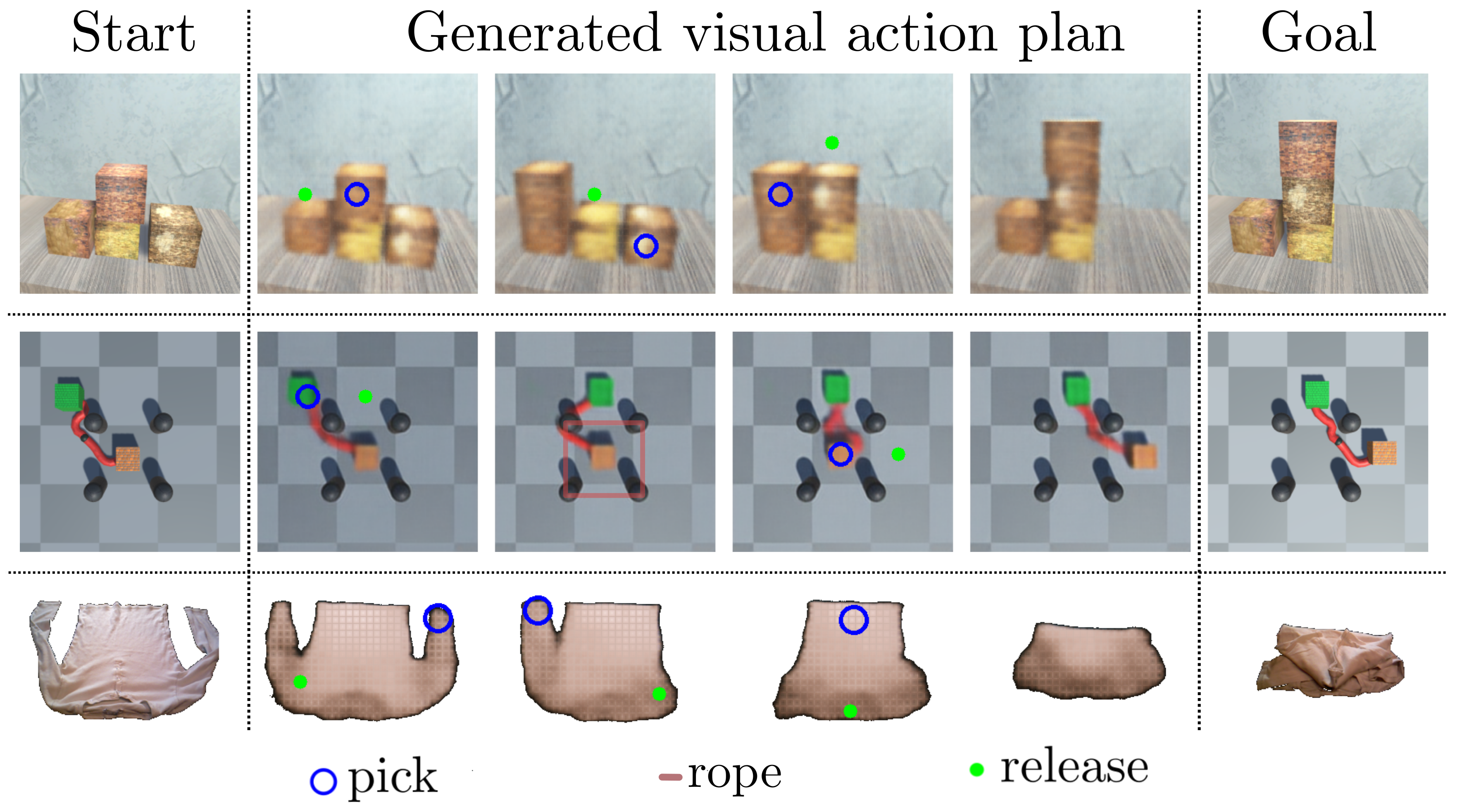
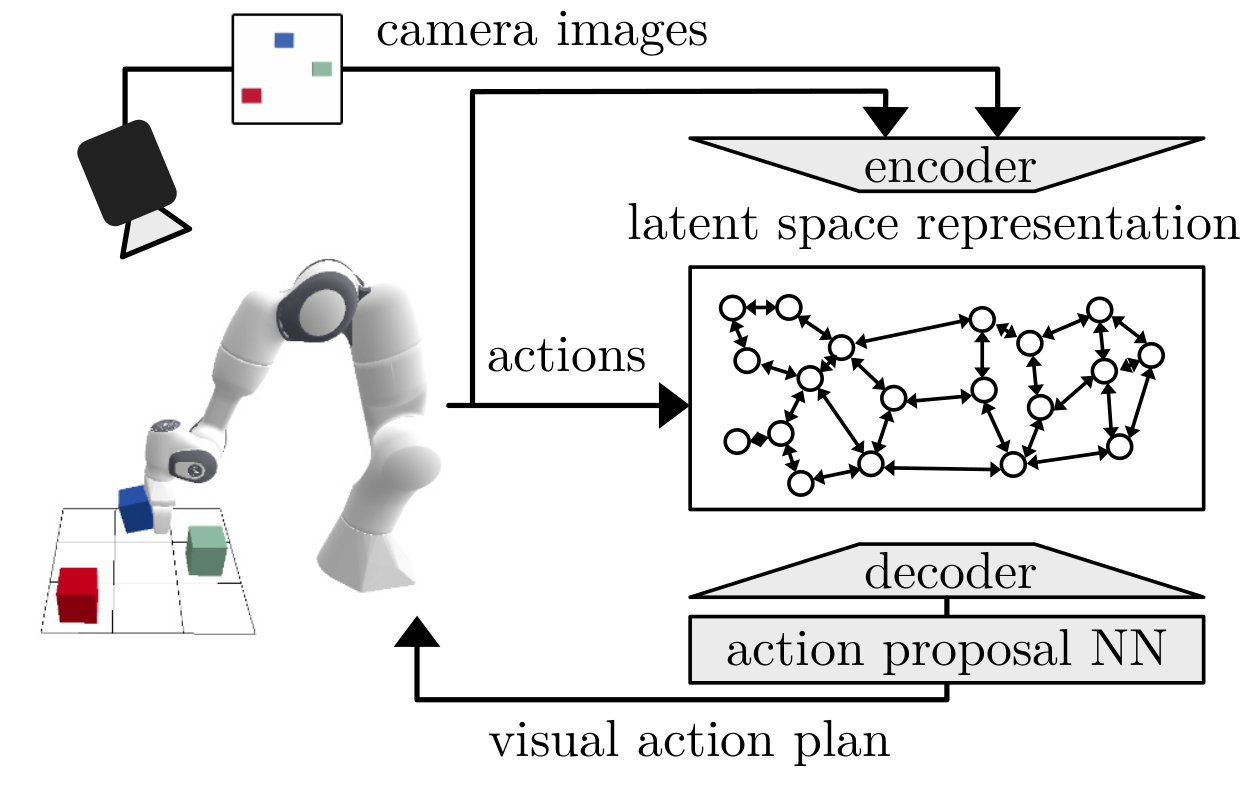
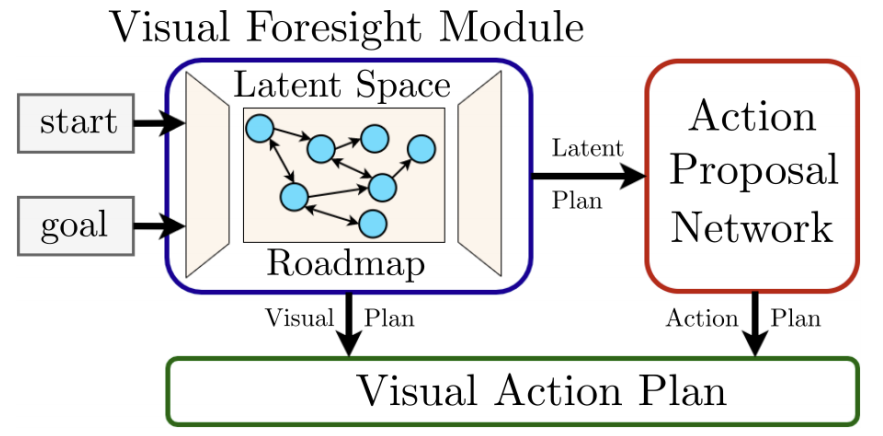
enhance the robustness of latent planning systems. We rely on our Latent Space Roadmap (LSR) framework, which builds a graph in a learned structured latent space to perform planning.
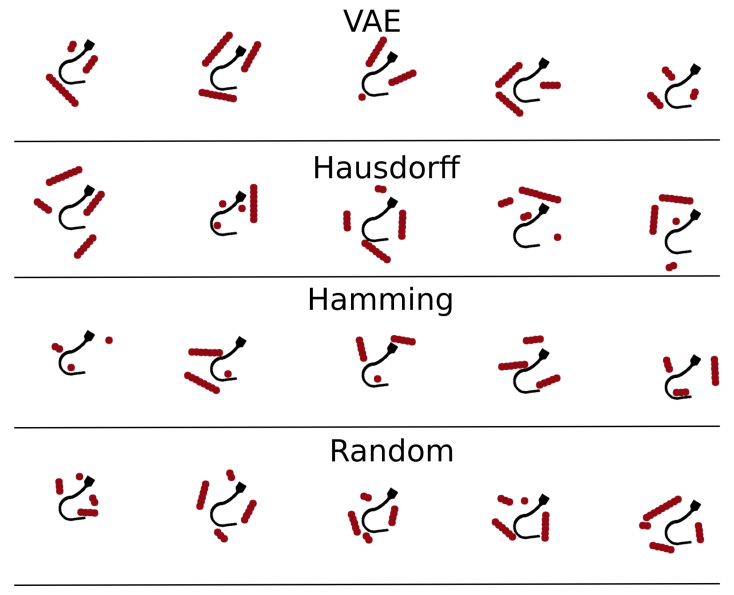
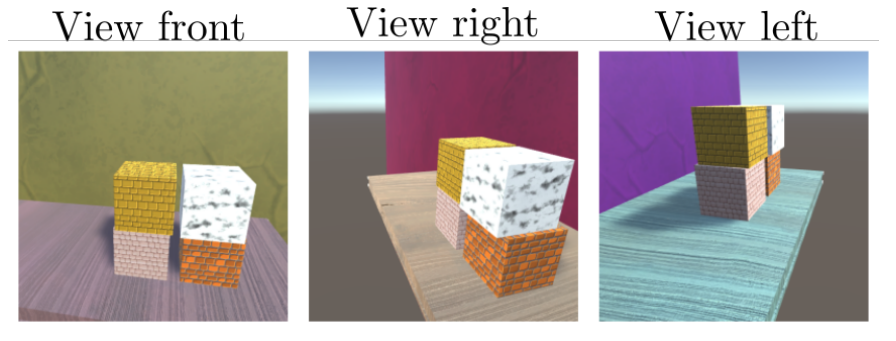
Given multiple LSR framework instances, that differ either on their latent spaces or on the parameters for constructing the graph, we use the action information as well as the embedded nodes of the produced plans to define similarity measures. These are then utilized to select the most promising plans. We validate the performance of our Ensemble LSR (ENS-LSR) on simulated box stacking and grape harvesting tasks as well as on a real-world robotic T-shirt folding experiment.
Planning in learned latent spaces helps to decrease the dimensionality of raw observations.
In this work, we propose to leverage the ensemble paradigm to
enhance the robustness of latent planning systems. We rely on our Latent Space Roadmap (LSR) framework, which builds a graph in a learned structured latent space to perform planning.
Given multiple LSR framework instances, that differ either on their latent spaces or on the parameters for constructing the graph, we use the action information as well as the embedded nodes of the produced plans to define similarity measures. These are then utilized to select the most promising plans. We validate the performance of our Ensemble LSR (ENS-LSR) on simulated box stacking and grape harvesting tasks as well as on a real-world robotic T-shirt folding experiment.
Submitted to IROS 2023
Enabling Robot Manipulation of Soft and Rigid Objects with
Vision-based Tactile Sensors
Michael C. Welle*, Martina Lippi*, Haofei Lu, Jens Lundell, Andrea Gasparri, Danica Kragic
Abstract—
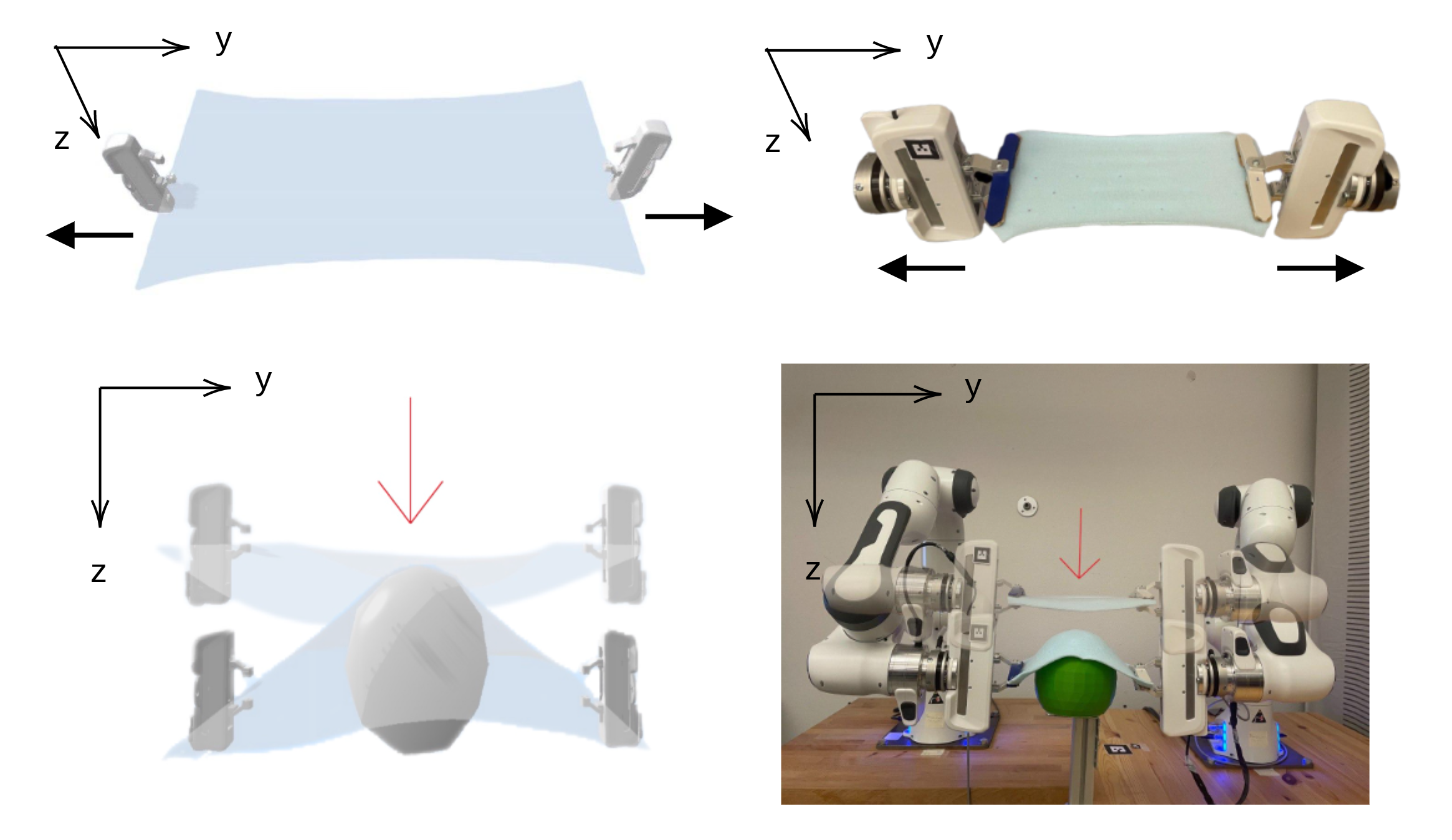
 Endowing robots with tactile capabilities opens up new possibilities for their interaction with the environment, including the ability to handle fragile and/or soft objects.
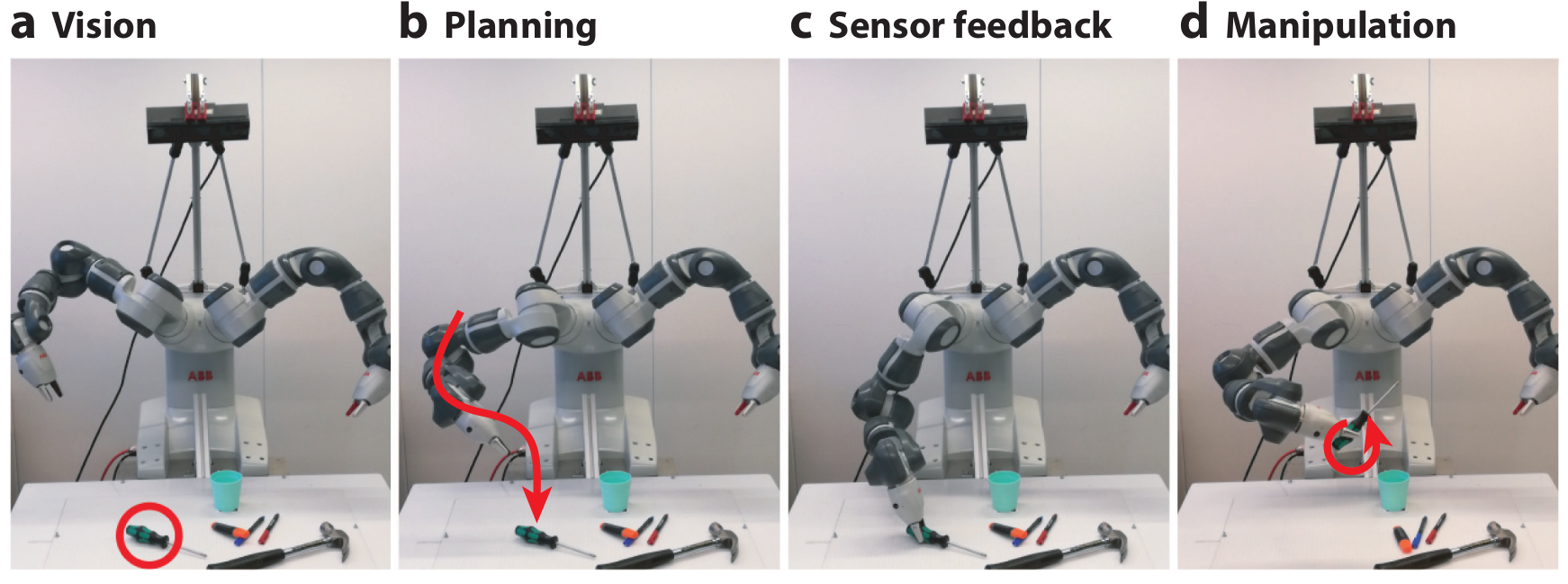
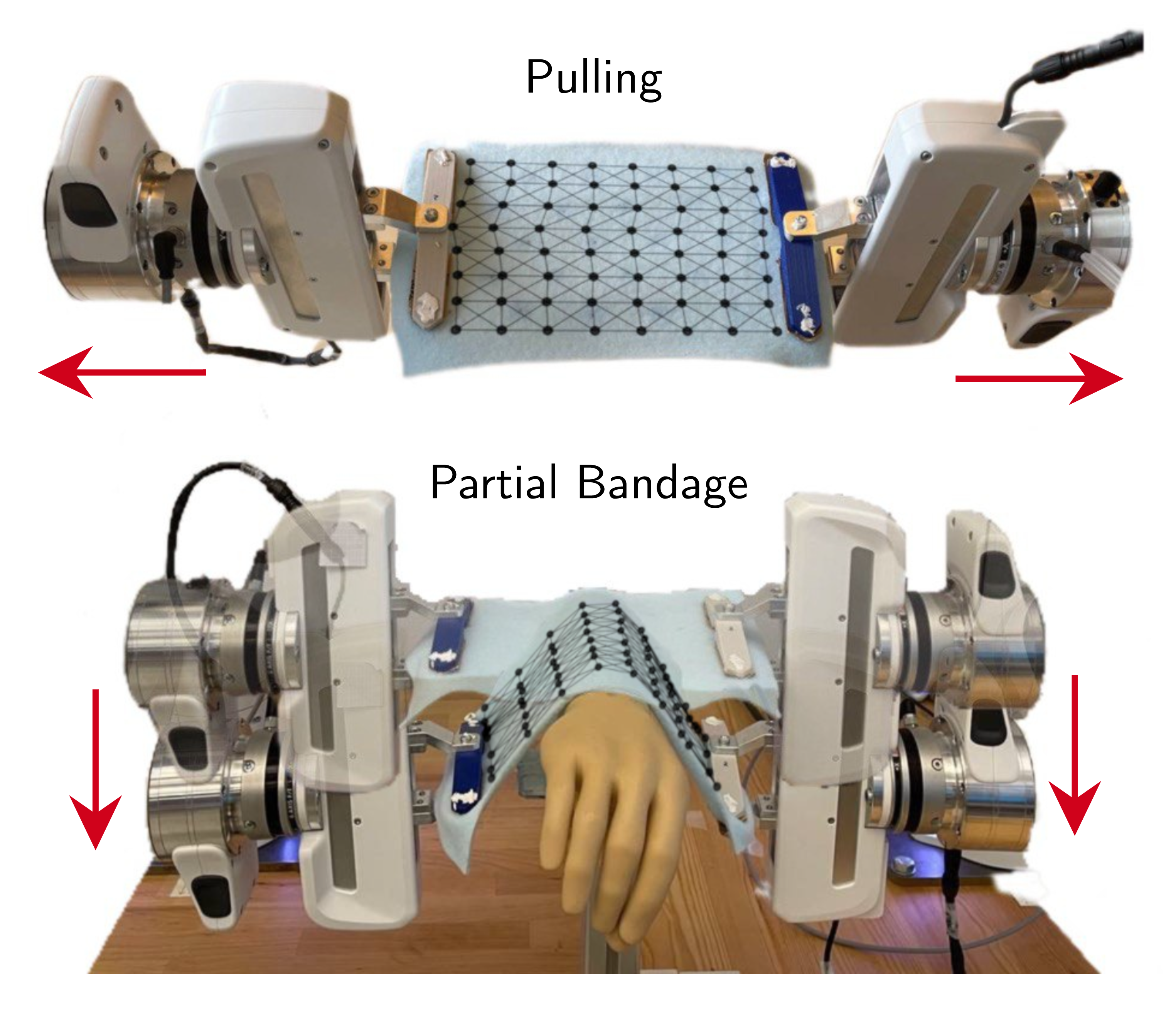
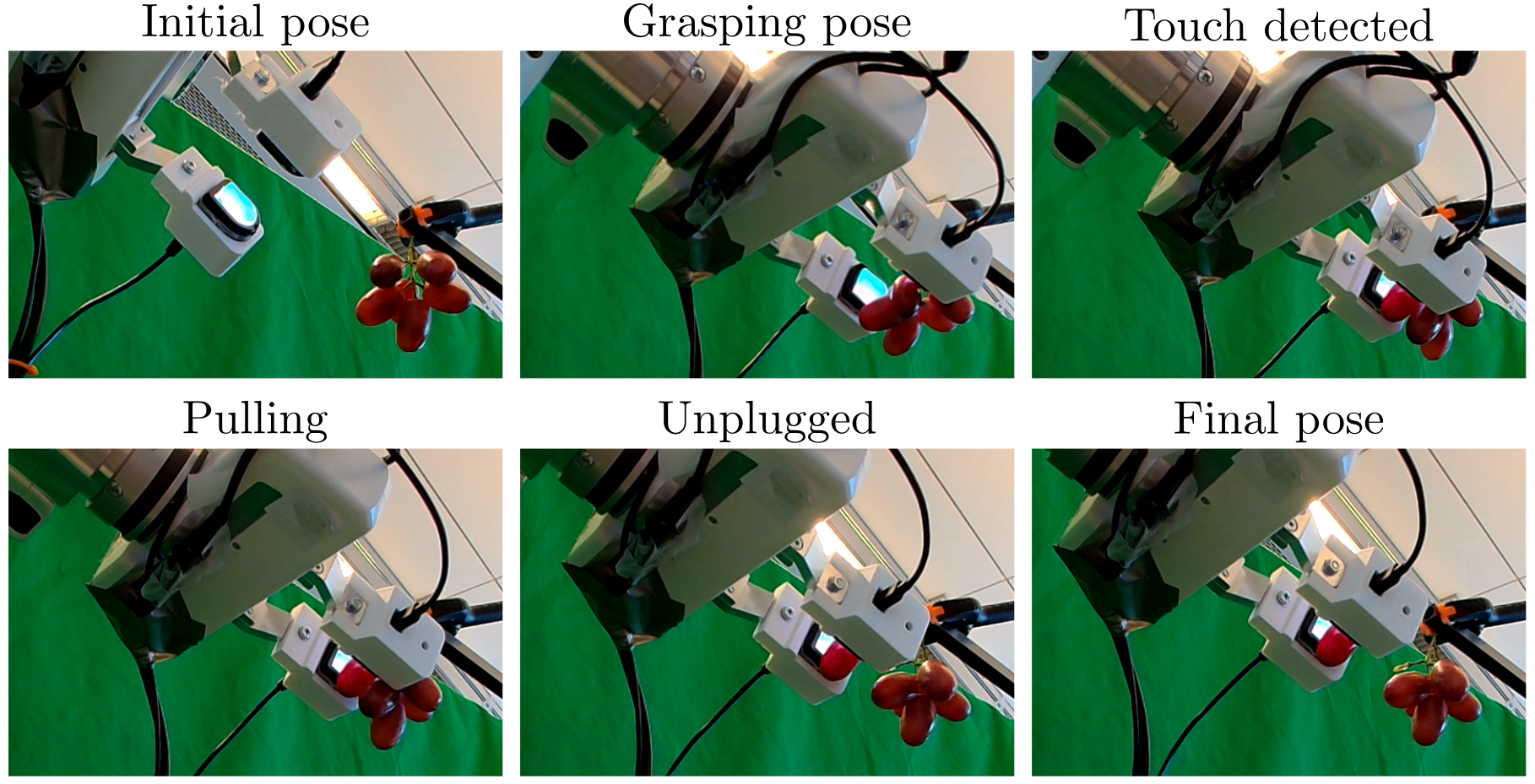
In this work, we equip the robot gripper with low-cost vision-based tactile sensors and propose a manipulation algorithm that adapts to both rigid and soft objects without requiring any knowledge of their properties. The algorithm relies on a touch and slip detection method, which considers the variation in the tactile images with respect to reference ones.
We validate the approach on seven different objects, with different properties in terms of rigidity and fragility, to perform unplugging and lifting tasks. Furthermore, to enhance applicability, we combine the manipulation algorithm with a grasp sampler for the task of finding and picking a grape from a bunch without damaging it.
Endowing robots with tactile capabilities opens up new possibilities for their interaction with the environment, including the ability to handle fragile and/or soft objects.
In this work, we equip the robot gripper with low-cost vision-based tactile sensors and propose a manipulation algorithm that adapts to both rigid and soft objects without requiring any knowledge of their properties. The algorithm relies on a touch and slip detection method, which considers the variation in the tactile images with respect to reference ones.
We validate the approach on seven different objects, with different properties in terms of rigidity and fragility, to perform unplugging and lifting tasks. Furthermore, to enhance applicability, we combine the manipulation algorithm with a grasp sampler for the task of finding and picking a grape from a bunch without damaging it.
Submitted to CASE 2023
A Virtual Reality Framework for Human-Robot Collaboration in Cloth Folding
Marco Moletta, Maciej K. Wozniak, Michael C. Welle, and Danica Kragic
Abstract—
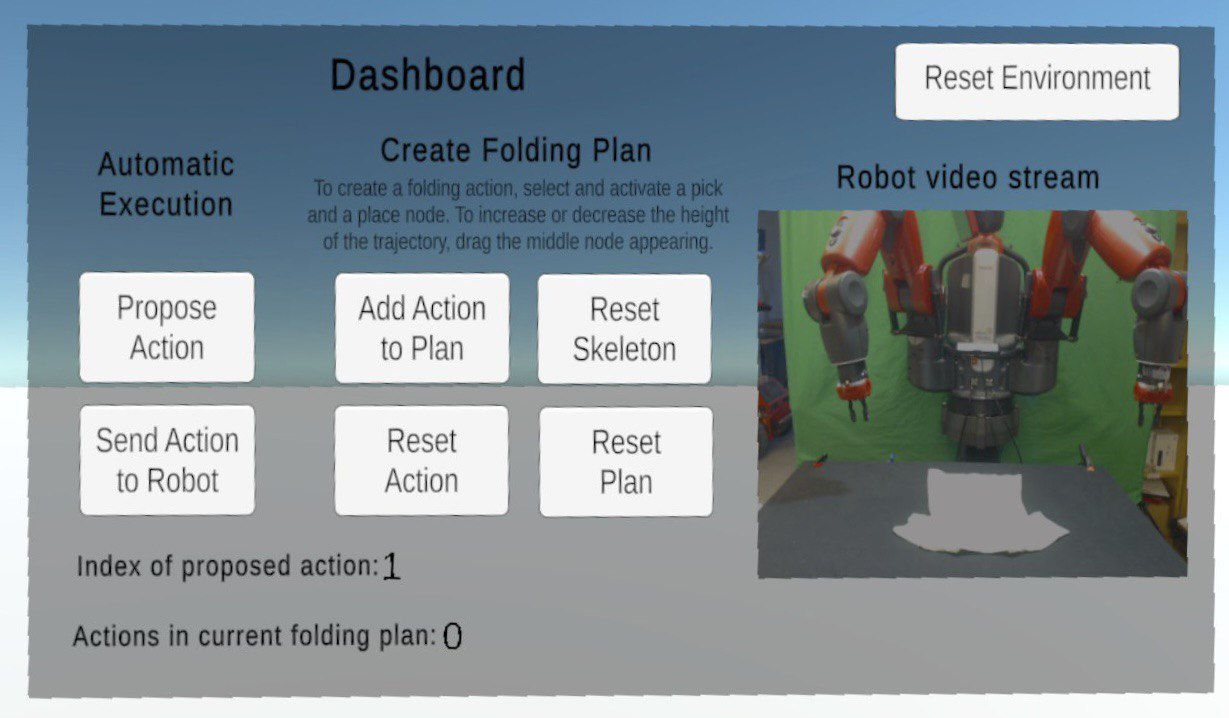 We present a virtual reality (VR) framework to automate the data collection process in cloth folding tasks. The framework uses skeleton representations to help the user define the folding plans for different classes of garments, allowing for replicating the folding on unseen items of the same class. We evaluate the framework in the context of automating garment folding tasks. A quantitative analysis is performed on 3 classes of garments, demonstrating that the framework reduces the need for intervention by the user. We also compare skeleton representations with RGB and binary images in a classification task on a large dataset of clothing items, motivating the use of the framework for other classes of garments.
We present a virtual reality (VR) framework to automate the data collection process in cloth folding tasks. The framework uses skeleton representations to help the user define the folding plans for different classes of garments, allowing for replicating the folding on unseen items of the same class. We evaluate the framework in the context of automating garment folding tasks. A quantitative analysis is performed on 3 classes of garments, demonstrating that the framework reduces the need for intervention by the user. We also compare skeleton representations with RGB and binary images in a classification task on a large dataset of clothing items, motivating the use of the framework for other classes of garments.
Submitted to Ro-man 2023