Överföringsfunktioner, PID
Innehåll
- Reglering av system
- Delarna i en PID
- Proportionell
- Integrerande
- Deriverande
Att reglera system
Förra veckan betraktade vi (mestadels) system utan styrning. Nu lägger vi även till styrning, genom att ge systemet insignaler.
Öppen styrning: När vi påverkar ett system med en insignal, utan att ta hänsyn till tillståndet hos systemet. Till exempel mikrovågsugn, diskmaskin, eller torktumlare.

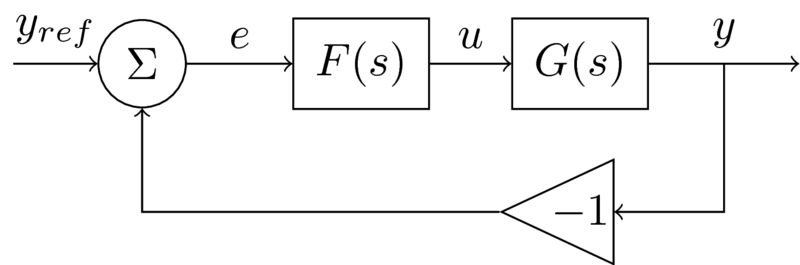
Med återkoppling: När insignalen beror på tillståndet hos systemet, eller på en mätbar utsignal. Exempelvis bilkörning, segway, flygplan.
\begin{eqnarray} Y(s) = G(s)F(s)\left( Y_{ref}-Y)\right) \nonumber \\ \implies Y(s)\left(1+G(s)F(s)\right) = G(s)F(s)Y_{ref}\nonumber \\ \implies Y(s) = \frac{G(s)F(s)}{1+G(s)F(s)}Y_{ref} \nonumber \end{eqnarray}
PID-regulatorn
En PID-regulator består av tre delar. De tre delarna är:
- Proportionell: Agerar direkt på det nuvarande felet. För stor P-del kan leda till instabilitet.
- Integrerande: Tar felhistoriken i hänsyn. Effekten av en integrator i återkopplingen är att det statiska felet försvinner. Integrator kan leda till svängiga system eller oönskade signaler.
- Deriverande: Derivatadelen ger ett positivt bidrag när felet ökar, och mindre då felet minskar. Detta ger en dämpande effekt på systemet.
Övningsuppgifter
3.25, 3.1