Research
 |
Joint Design of Optimal Controller and Transmission Schedules
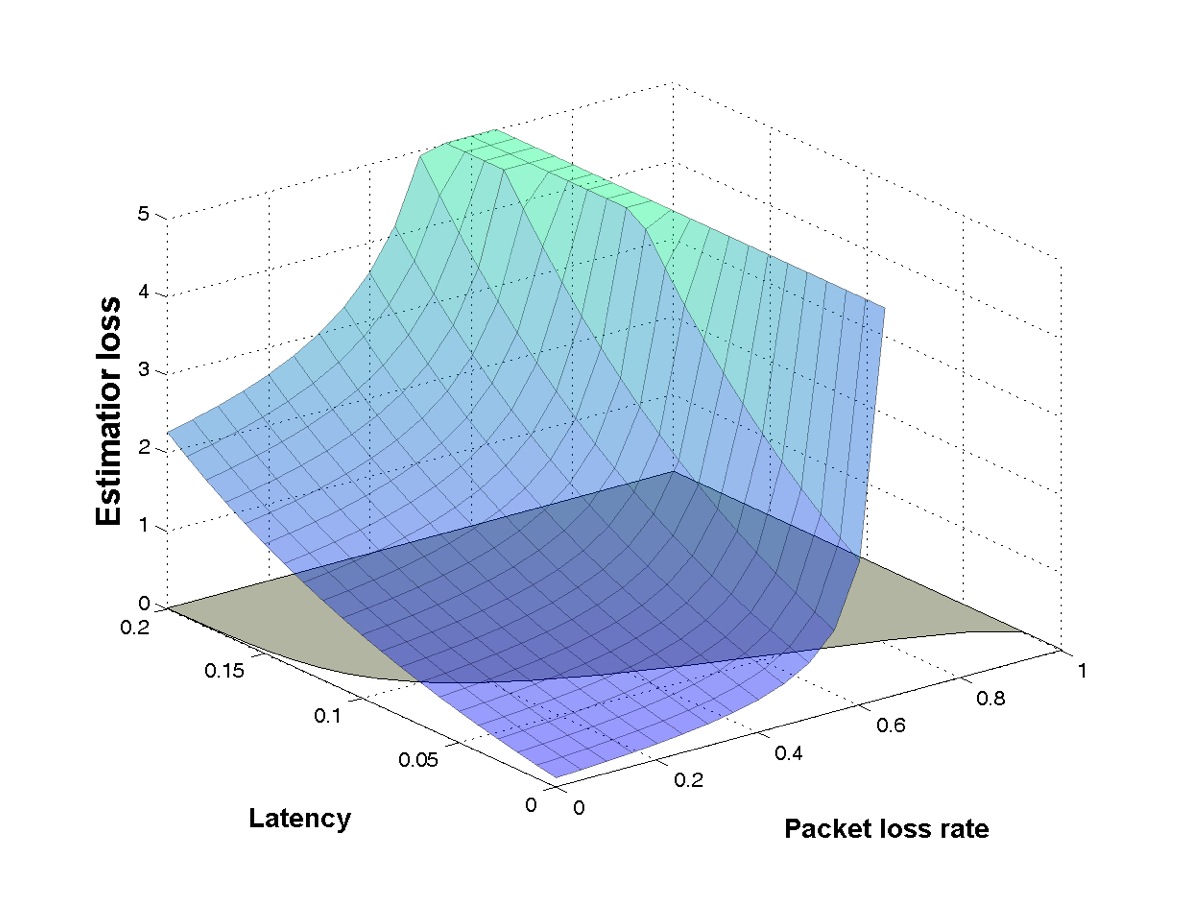 |
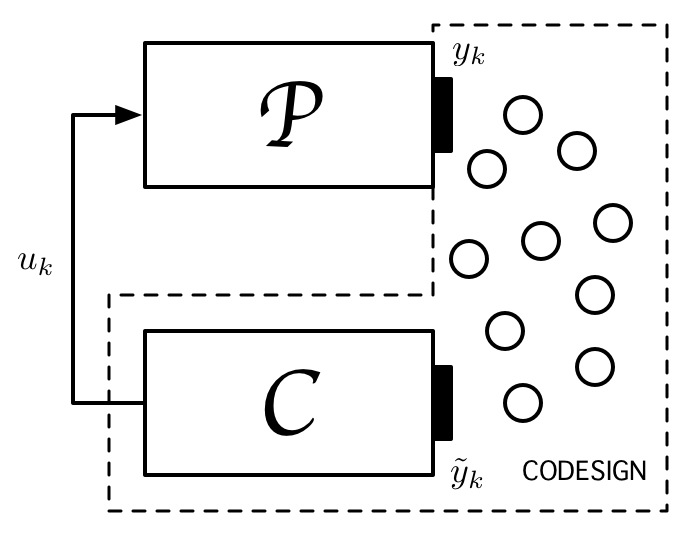
We consider the joint design of forwarding policies and controllers for
wireless control loops where sensor measurements are sent over an unreliable
multi-hop wireless network to the controller node. For fixed sampling rate of the control loop,
the co-design problem separates into two
well-defined and independent subproblems: transmission scheduling for
maximizing the delay-constrained reliability and optimal control under packet loss. We develop optimal solutions for these subproblems and show that the
optimally co-designed system can be found by a one-dimensional search over
the sampling interval. Several numerical examples illustrate the power of our approach. |
B. Demirel, Z. Zou, P. Soldati and M. Johansson, “Modular Design of Jointly Optimal Controllers and Forwarding Policies for Wireless Control”, IEEE Transactions on Automatic Control, Special Issue on Control of Cyber-Physical Systems, vol. 59, no. 12, pp. 3252-3265, Dec. 2014.
Z. Zou, B. Demirel and M. Johansson, “Minimum-Energy Packet Forwarding Policies for LQG Performance in Wireless Control Systems”, in the
 IEEE Conference on Decision and Control (CDC’12), Maui, Hawaii, Dec. 2012.
IEEE Conference on Decision and Control (CDC’12), Maui, Hawaii, Dec. 2012.B. Demirel, Z. Zou, P. Soldati and M. Johansson, “Modular Co-design of Controllers and Transmission Schedules in WirelessHART”, in the
 IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, December 2011.
IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, December 2011.B. Demirel, Z. Zou, P. Soldati and M. Johansson, “Towards Optimal Co-design of Controllers and Transmission Schedules in WirelessHART”, Information Processing in Sensor Networks (IPSN) Workshop CFP: Real-Time Wireless for Industrial Applications, Chicago, USA, 2011.
Supervisory Control for Networked Systems
 |
This work proposes a supervisory control structure for networked systems with time-varying communication delays.
The supervisor triggers the most suitable controller of a multi-controller unit based on the current networked-induced delay.
This control structure aims at improving the closed-loop control performance relative to what can be achieved using a single robust controller.
We demonstrate that stability of the supervisory control loop can be analyzed by solving a set of linear matrix inequalities.
Furthermore, we show that the state feedback gains for the multi-controller unit can be computed via semi-definite programming.
In particular, we study stability of supervisory control systems under average dwell-time switchings.
Finally, wide-area power system control application is used to illustrate the effectiveness of the proposed technique. |
B. Demirel, C. Briat and M. Johansson, “Deterministic and Stochastic Approaches to Supervisory Control Design for Networked Systems with Time-varying Communication Delays”, Nonlinear Analysis: Hybrid Systems, Special Issue related to IFAC Conference on Analysis and Design of Hybrid Systems (ADHS 12), vol. 10, pp. 94-110, November 2013.
B. Demirel, C. Briat and M. Johansson, “Supervisory Control Design for Networked Systems with Time-Varying Communication Delays”, in the
 IFAC Conference on Analysis and Design of Hybrid Systems (ADHS’12), Eindhoven, the Netherlands, 2012.
IFAC Conference on Analysis and Design of Hybrid Systems (ADHS’12), Eindhoven, the Netherlands, 2012.
Robust Repetitive Control System Design with Application to AFM
A parameter space procedure for designing chosen parameters of a repetitive controller to satisfy a robust performance criterion is presented. Using this method, low-order robust repetitive controllers can be designed and implemented for plants that possibly include time delay, poles on the imaginary axis and discontinuous weights. A design and simulation study based on a high speed atomic force microscope position control example is utilized to illustrate the method presented in this paper.
B. Aksun Guvenc, S. Necipoglu, B. Demirel and L. Guvenc, “Robust Control of Atomic Force Microscopy”, Mechatronics by J. Paulo Davim, Wiley-ISTE, March 2011.
B. Demirel and L. Guvenc, “Parameter Space Design of Repetitive Controllers for Satisfying a Robust Performance Requirement”, IEEE Transactions on Automatic Control, vol. 55, no. 8, pp. 1893-1899, Aug. 2010.
S. Necipoglu, B. Demirel and L. Guvenc, “Fast AFM Scanning with Parameter Space Based Robust Repetitive Control Designed Using COMES Toolbox”, ASME Biennial Conference on Engineering Systems Design and Analysis, Istanbul, Turkey, July 12 - 14, 2010.