Remote Sensing Using UAVs
Introduction
This project was part of the PhD course in “Construction of Autonomous Unmanned Aerial Vehicles (2011)”
The goal of this project was to assess the use of Wireless Sensor Networks (WSN) and UAV capabilities for environment monitoring. We performed a remote sensing and data transmission on a controlled environment. The follow-up project uses a UAV for remote sensing at field with many sensors.We evaluated the following case:
Real-Time data retrieval: In this case, we used the UAV as a relay network that retrieves data from remote and neaby sensor network field (represented by a single sensor see video).
Due to the bursty links nature of WSNs, and the existence of WiFi APs, we expected many packet losses. Our main goal, was to develop a communication protocol that was able to reliably retrieve and transmit the sensed data. Since the quality of the received measurements depends on the reliability of the communication protocol, we evaluated the impact of the UAV vibration, and antena position changes on the packet reception ratio (prr). We used TmoteSky wireless sensor nodes equiped with Texas CC2420 radio and compatible with the IEEE802.15.4 standard.
Evaluation Scenario
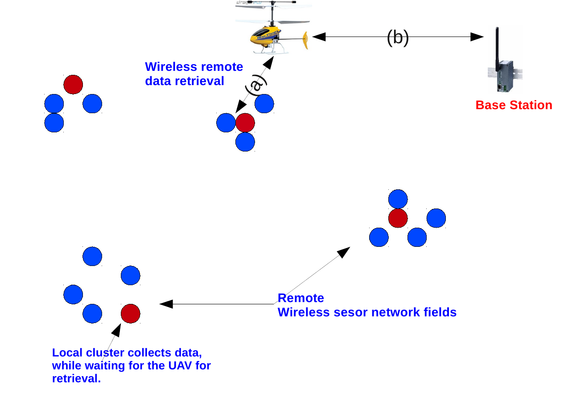 |
Our proposed evaluation scenario, consists of:
A UAV: it is used for navigating the remote sensor field. The UAV is also attached to a wireless sensor device so that it acts as a relay network (i.e remote sensor and the base station).
Sensor field: we used a TmoteSky equiped with Temperature and Humidy sensors as our remote sensor field. However, we only were interested in the reliability of the communication protocol, not in the data itself. We included the readings of the temperature and the humidy sensors on each transmitted packet, therefore, their values can be displayed on real-time at the base-station.
A base-station(BS): it is a TmoteSky wireless sensor, whose goal is to collect data relayed by the UAV. The BS also transmits each received packet to the serial port, so that the contents of the packet can be interprected and displayed in a Graphical User Interface (GUI).
Data Retrieval Protocol Design
The communication protocol was developed under the Contiki OS. The “Contiki OS” is an open source, highly portable, multi-tasking operating system for memory-efficient networked embedded systems and wireless sensor networks" developed at the Swedish Institute of Computer Science (SICS).
The main components of the communication protocol are:
a Time Division Multiple Access (TDMA) Medium Access Control (MAC) protocol,
a routing engine, and
the loss recovery engine.
The loss recovery engine ensures that when an acklowledgement of a packet is not received, the packet will not be removed from the node internal buffer.
Project Results
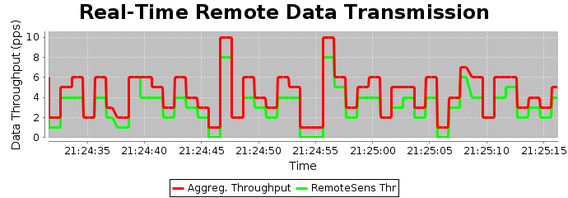
Realtime average data throughput.
We observed that the behaviour of the data throughput in the network due to the UAV vibration is bursty.
The green curve is the received data throughout from the remote sensor node, while the red line is the agregate data throughput at the BS. Note that the wireless sensor node attached to the UAV also transmits data. We observed that the data peaks normally occur before a 0 packets/sec. This is due to the loss of link between the UAV and the remote sensor field. In this cases, the recovery mechanism makes sure that, the data is transmitted as quick as possible as soon as the link is restablished.
 |
Detecting When The UAV is Out of Range to the Remote Sensor Field
When the radio of the wireless sensor attached to the UAV is out of range to the remote sensor field, the Figure bellow shows that the received data rate for the remote sensor is zero (green line).
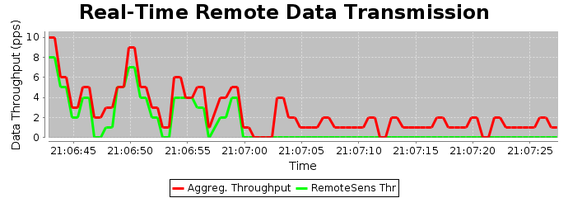 |
Conclusion
Under normal circyúnstances, we observed that the total number of packets lost was minimal. However, this is only true if the loss of connectivity does not last for a longer time. The reason is that, it depends on the buffer capacity at the remote sensor node. Unfrequent visits from the UAV makes the buffer saturate, because newly generated packets are discarded. This fact will increase the packet loss.
Real-Time Monitoring using a GUI
The experimental results could be visualized on real-time from the PC. This video capture displays the GUI video.mp4
UAV Control and Guidance System.
We performed the experiments in a controlled environment. This is due to the limitations we had. Rain, lack of outdoor Skull for the UAV, and a wind weather.
It was extremelly difficult to guide the UAV. We discovered that contrary to what the manufacturer states, AR.Drone from parrot works well only on Iphones and not for Android smartphones (see videos Video-1, Video-2)
Setting Up Experiment
Attaching sensors to the UAV, and pre-setup: Video-3
Procurement
15 TmoteSky wireless sensors, from our Department (EE-ReglerTeknik)
1 Quadruport (accidented)
1 Ar.Drone from Parrot
1 smart phone (behaves as the command center for the drone)
1 Laptop (connects to the BS node, and runs a GUI where uses can visualise real-time data)
Adhesive for attaching the wireless sensor to the drone
Battery cells
A GUI developed in Java and JfreeChart