
Ongoing Projects
High-Confidence Transformer-Based Compilation of Partially Ambiguous Programs
 This project is a WASP Academic PhD student project, focusing on the future of software engineering in general, and how to combine natural and formal languages in particular. The purpose of the project is threefold: (i) to study a novel future direction of how software can be developed using transformers and large language models, (ii) to create a formal foundation for such a direction, and (iii) to construct and evaluate a sound and secure compiler prototype. The project started in 2025 and is funded by the Wallenberg AI, Autonomous Systems and Software Program (area WASP-AI). For more information about the project, see the project website.
This project is a WASP Academic PhD student project, focusing on the future of software engineering in general, and how to combine natural and formal languages in particular. The purpose of the project is threefold: (i) to study a novel future direction of how software can be developed using transformers and large language models, (ii) to create a formal foundation for such a direction, and (iii) to construct and evaluate a sound and secure compiler prototype. The project started in 2025 and is funded by the Wallenberg AI, Autonomous Systems and Software Program (area WASP-AI). For more information about the project, see the project website.

This project is financially supported by the Wallenberg AI, Autonomous Systems and Software Program (area WASP-AI).
High-Confidence Agile Development of Safety-Critical Systems using Verified Large Language Models (SAFEGILE)
 This project aims to study a dramatically different approach to software development of safety-critical systems. Specifically, the overall research goal is to: develop a new foundation for agile development of complex and regulated safety-critical cyber-physical systems that enable high-confidence rapid software development of systems with certification compliance requirements. This project is conducted in close collaboration between the aerospace and defense company Saab AB and KTH Royal Institute of Technology. For more information about the project, see the project website.
This project aims to study a dramatically different approach to software development of safety-critical systems. Specifically, the overall research goal is to: develop a new foundation for agile development of complex and regulated safety-critical cyber-physical systems that enable high-confidence rapid software development of systems with certification compliance requirements. This project is conducted in close collaboration between the aerospace and defense company Saab AB and KTH Royal Institute of Technology. For more information about the project, see the project website.

This project is financially supported by Digital Futures.
Safe Artificial Mental Models for Cyber-Physical Systems Learning
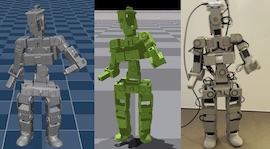 The purpose of this project is twofold: (i) to study how to formally define artificial mental models of cyber-physical systems (CPS) that enable explainable and safe interaction with users via large language models (LLMs), and (ii) to investigate how artificial mental models can enable both efficient and safe sensing, actuation, and learning of such systems in a real physical setting. As part of the project, we work on reinforcement learning and control of a humanoid robot developed within our group.
The purpose of this project is twofold: (i) to study how to formally define artificial mental models of cyber-physical systems (CPS) that enable explainable and safe interaction with users via large language models (LLMs), and (ii) to investigate how artificial mental models can enable both efficient and safe sensing, actuation, and learning of such systems in a real physical setting. As part of the project, we work on reinforcement learning and control of a humanoid robot developed within our group.

This project is financially supported by the Swedish Research Council (VR).
DarkTree: Charting the Dark Regions of the Insect Tree Using Computer Vision, Genomics, and Probabilistic Machine Learning
 This 5-year project aims to build a new foundation for assessing the state of global insect biomes, from automated identification of species to improved accuracy of biodiversity impact reporting using environmental DNA. The project is led by Prof. Fredrik Ronquist at the Natural History Museum. David Broman is co-PI, and his group focuses on developing algorithms and compiler optimization techniques for scalable probabilistic inference of phylogenetic trees.
This 5-year project aims to build a new foundation for assessing the state of global insect biomes, from automated identification of species to improved accuracy of biodiversity impact reporting using environmental DNA. The project is led by Prof. Fredrik Ronquist at the Natural History Museum. David Broman is co-PI, and his group focuses on developing algorithms and compiler optimization techniques for scalable probabilistic inference of phylogenetic trees.
This project is financially supported by Knut and Alice Wallenberg Foundation. Please see the project website for more information.
TECoSA - Center for Trustworthy Edge Computing Systems and Applications
 TECoSA is a research center funded by Vinnova. It consists of several co-PIs (David Broman, György Dán, Elena Dubrova, Lei Feng, Elena Fersman, James Gross, Iolanda Leite, Jana Tumová, and Martin Törngren) at KTH and 13 industrial partners. David Broman is a co-PI of the center and involved in a joint project related to safety. The main topic for David's group in this project is on probabilistic programming and AI for Edge computing. This project focus on the collaboration with industry. For more information about the TECoSA in general, please see the research center website.
TECoSA is a research center funded by Vinnova. It consists of several co-PIs (David Broman, György Dán, Elena Dubrova, Lei Feng, Elena Fersman, James Gross, Iolanda Leite, Jana Tumová, and Martin Törngren) at KTH and 13 industrial partners. David Broman is a co-PI of the center and involved in a joint project related to safety. The main topic for David's group in this project is on probabilistic programming and AI for Edge computing. This project focus on the collaboration with industry. For more information about the TECoSA in general, please see the research center website.

This project is financially supported by Vinnova.
Previous Projects
Data-Limited Learning of Complex Dynamical Systems -Impact and Demonstrators
 The goal of the collaborative impact project is to leverage the novel technical and theoretical research results from the data-limited learning project to create added value and technical transfer to the Swedish industry (Saab and AstraZeneca) and to create interactive physical demonstrators for the Digital Futures Hub and the general public. This impact project is an extension to the 4-year project Data-Limited Learning of Complex Dynamical Systems (DLL), where the new project focuses on impact activities, software prototypes, and demonstrators. See the following for the previous DLL project. For more information about the project, see the project website.
The goal of the collaborative impact project is to leverage the novel technical and theoretical research results from the data-limited learning project to create added value and technical transfer to the Swedish industry (Saab and AstraZeneca) and to create interactive physical demonstrators for the Digital Futures Hub and the general public. This impact project is an extension to the 4-year project Data-Limited Learning of Complex Dynamical Systems (DLL), where the new project focuses on impact activities, software prototypes, and demonstrators. See the following for the previous DLL project. For more information about the project, see the project website.
This project is financially supported by Digital Futures.
DLL - Data-Limited Learning of Complex Dynamical Systems
 The DLL project is a project funded by Digital Futures, a research center at KTH, SU, and RISE. The project is a collaboration between five co-PIs: David Broman (main PI), Saikat Chatterjee, Veronique Chotteau, Håkan Hjalmarsson, and Alexandre Proutiere. The project is initially funded as a start-up project during 2019. After a hearing by an international panel, the project was extended to a 4-year 20 MSEK project, starting in July 2020. The overall research objective is development of new techniques, methods, and tools to learn and control complex dynamical systems using limited number of data samples and structural information in a reliable manner. For more information about the project, see the project website.
The DLL project is a project funded by Digital Futures, a research center at KTH, SU, and RISE. The project is a collaboration between five co-PIs: David Broman (main PI), Saikat Chatterjee, Veronique Chotteau, Håkan Hjalmarsson, and Alexandre Proutiere. The project is initially funded as a start-up project during 2019. After a hearing by an international panel, the project was extended to a 4-year 20 MSEK project, starting in July 2020. The overall research objective is development of new techniques, methods, and tools to learn and control complex dynamical systems using limited number of data samples and structural information in a reliable manner. For more information about the project, see the project website.
This project is financially supported by Digital Futures.
Deep Probabilistic Neural Networks for Survival Analysis
 This project is a collaboration project between David Broman (KTH) and Thomas Schön (Uppsala University). It is funded by the Wallenberg AI,
Autonomous Systems and Software Program (area WASP-AI) and funds two PhD students (one at KTH and one in Uppsala). The project started in the fall 2019, and is a 5-year project. The aim of the project is to introduce a novel way to combine deep neural networks with probabilistic programming to address the fundamental problem of learning representations for probabilistic deep neural networks.
This project is a collaboration project between David Broman (KTH) and Thomas Schön (Uppsala University). It is funded by the Wallenberg AI,
Autonomous Systems and Software Program (area WASP-AI) and funds two PhD students (one at KTH and one in Uppsala). The project started in the fall 2019, and is a 5-year project. The aim of the project is to introduce a novel way to combine deep neural networks with probabilistic programming to address the fundamental problem of learning representations for probabilistic deep neural networks.
This project is financially supported by the Wallenberg AI, Autonomous Systems and Software Program (area WASP-AI).
DPPL - Differentiable Probabilistic Programming Languages
 The DPPL project is a personal grant awarded to David Broman (4.2 million SEK) and is sponsored by the Swedish research council (VR). The project started January 2019 and continues for 4 years, with the possibility of one year extension. The overall goal of this project is to develop a new theoretical foundation for differentiable probabilistic programming languages that enables efficient and robust learning-based real-time systems. A novelty of our approach is to combine state-of-the-art techniques from three separate research communities: (i) machine learning (stochastic gradient descent and Bayesian inference methods), (ii) programming and modeling languages (operation semantics, type theory, meta-programming, and partial evaluation), and (iii) real-time systems (scheduling theory and timing analysis).
The DPPL project is a personal grant awarded to David Broman (4.2 million SEK) and is sponsored by the Swedish research council (VR). The project started January 2019 and continues for 4 years, with the possibility of one year extension. The overall goal of this project is to develop a new theoretical foundation for differentiable probabilistic programming languages that enables efficient and robust learning-based real-time systems. A novelty of our approach is to combine state-of-the-art techniques from three separate research communities: (i) machine learning (stochastic gradient descent and Bayesian inference methods), (ii) programming and modeling languages (operation semantics, type theory, meta-programming, and partial evaluation), and (iii) real-time systems (scheduling theory and timing analysis).
This project is financially supported by the Swedish Research Council (VR).
HMC - Heterogeneous Model Compilers for Uncertain Environments
 HMC is a 5-year research project awarded to David Broman, as part of
the Swedish Foundation for Strategic Research
(SSF)'s individual
grant for future leaders (FFL 6). The project started in January
2017 and has a total funding of 12 million SEK. The overall goal is to develop new techniques and tools that make it easier to
develop complex systems, by combining heterogeneous models and to
automatically generate efficient runtime systems on heterogeneous
platforms. The concrete expected output is an open-source model-based
compiler that will be directly usable to the industry.
HMC is a 5-year research project awarded to David Broman, as part of
the Swedish Foundation for Strategic Research
(SSF)'s individual
grant for future leaders (FFL 6). The project started in January
2017 and has a total funding of 12 million SEK. The overall goal is to develop new techniques and tools that make it easier to
develop complex systems, by combining heterogeneous models and to
automatically generate efficient runtime systems on heterogeneous
platforms. The concrete expected output is an open-source model-based
compiler that will be directly usable to the industry.
![]()
For more information about the HMC project, see the project website. This project is financially supported by the Swedish Foundation for Strategic Research (SSF).
ASSEMBLE - Automating System SpEcific Model-Based Learning
 ASSEMBLE is a 5-year research project that is financially supported by
the Swedish Foundation for Strategic Research (SSF). The project
started in July 2016 and has a total funding of 29 million SEK. The objective
of the project is to develop a new probabilistic modeling language
together with new machine learning inference algorithms
to enable fast and complex development of smart systems. The project
team consists of four researchers: From KTH:
David Broman and Joakim Jaldén. From Uppsala University: Thomas Schön
(main PI) and David Black-Schaffer.
ASSEMBLE is a 5-year research project that is financially supported by
the Swedish Foundation for Strategic Research (SSF). The project
started in July 2016 and has a total funding of 29 million SEK. The objective
of the project is to develop a new probabilistic modeling language
together with new machine learning inference algorithms
to enable fast and complex development of smart systems. The project
team consists of four researchers: From KTH:
David Broman and Joakim Jaldén. From Uppsala University: Thomas Schön
(main PI) and David Black-Schaffer.
![]()
For more information about the ASSEMBLE project, see the project website. This project is financially supported by the Swedish Foundation for Strategic Research (SSF).
High-Confidence Formal Verification of Real Cyber-Physical Systems: from Models to Machine Code
 This project is an expedition project funded by the Wallenberg AI,
Autonomous Systems and Software Program (area WASP-AS). The project started in 2019, and is a 2-year project with possible extension. It is a collaboration between two
co-PI:s, David Broman (KTH) and Magnus Myreen (Chalmers). The project
funds three postdocs (one in Chalmers and two at KTH). The overall
research goal of this project is to develop a new theoretical
foundation of formally verified cyber-physical domain-specific model
compilation, from high-level real system models down to machine code,
satisfying both functional and temporal constraints. The project is
implemented using Coq (KTH) and HOL4 (Chalmers).
This project is an expedition project funded by the Wallenberg AI,
Autonomous Systems and Software Program (area WASP-AS). The project started in 2019, and is a 2-year project with possible extension. It is a collaboration between two
co-PI:s, David Broman (KTH) and Magnus Myreen (Chalmers). The project
funds three postdocs (one in Chalmers and two at KTH). The overall
research goal of this project is to develop a new theoretical
foundation of formally verified cyber-physical domain-specific model
compilation, from high-level real system models down to machine code,
satisfying both functional and temporal constraints. The project is
implemented using Coq (KTH) and HOL4 (Chalmers).
This project is financially supported by the Wallenberg AI, Autonomous Systems and Software Program (area WASP-AS).
This is a personal web page. More information.