FLEXBOT explores how how topological representations can be used for an integrated approach toward i) vision based understanding of complex human hand motion, ii) mapping and control of robotics hands based on the extracted knowledge, and iii) integrating the topological representations with models for high-level task encoding and task level planning. Our research opens for new and important areas scientifically and technologically. Scientifically, we push for new way of thinking in an area that has traditionally been born from mechanics an modelling of bodies but not seeking for optimal design. Technologically, we will provide methods plausible for evaluation of new designs of robotic and prosthetic hands. Further development of machine learning and computer vision methods will allow for scene understanding that goes beyond the assumption of worlds of rigid bodies, including articulated and flexible objects such as hands.

Using a proven-in-practice user-centric design methodology, TRADR develops novel S&T for human-robot teams to assist in disaster response eorts, over multiple missions: The novel S&T makes experience persistent. Various kinds of robots collaborate with human team members to explore the environment, gather physical samples, and distribute aid to victims. Throughout this collaborative eort, TRADR enables the team to gradually develop its understanding of the disaster area over, multiple possibly asynchronous missions (persistent envi- ronment models), to improve team members' understanding of how to work in the area (persistent multi-robot action models), and to improve team-work (persistent human-robot teaming).

While the majority of current robot architectures is based on a perception-then-action control strategy, the eSMCs project adopts a theoretical perspective that turns this classical view upside-down and emphasizes the constitutive role of action for perception. The key concept our project is based on is that of sensorimotor contingencies, that is, law-like relations between actions and associated changes in sensory input.
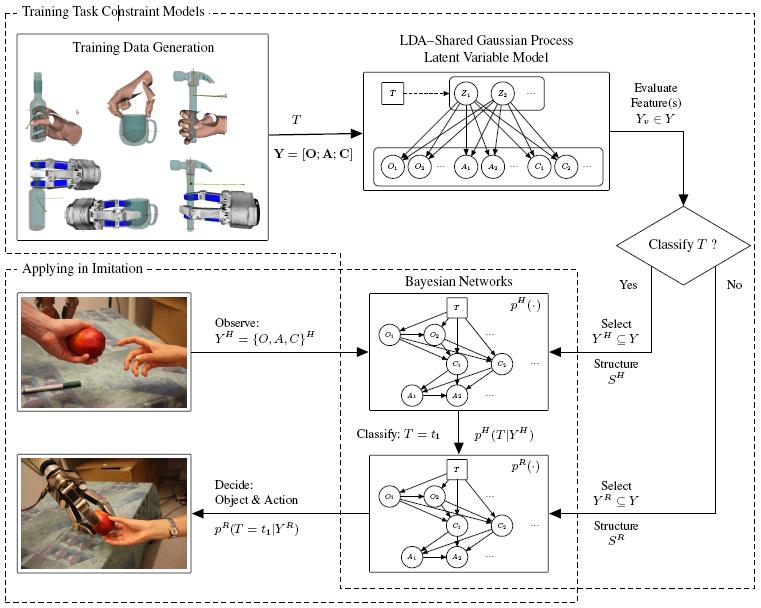
The main objective of this project is to develop a learning framework based on probabilistic reasoning integrated with a control theoretic approach that exploits the available mechanical dexterity of single and multi-agent robot platforms to perform complex tasks in natural environments. To achieve this, we will implement and evaluate the theoretic foundations in realistic scenarios on single and multiple robot platforms, demonstrating the feasibility and scalability of the approach. As modeling tools, we will use techniques from optimization and systems theory, automatic control, machine learning, and sensors fusion.
The project aims at exploiting recent developments in vision, robotics, and control to tackle coordination in heterogeneous multi-robot systems. Such systems hold promise for achieving robustness by leveraging upon the complementary capabilities of different agents and efficiency by allowing sub-tasks to be completed by the most suitable agent. A key challenge is that agent composition in current multi-robot systems needs to be constant and pre-defined. Moreover, the coordination of heterogeneous multi-agent systems has not been considered in manipulative scenarios. We propose a reconfigurable and adaptive decentralized coordination framework for heterogeneous multiple and multi-DOF robot systems.
This project aims at enabling robots to competently perform everyday human-scale manipulation activities - both in human working and living environments. In order to achieve this goal, Robohow pursues a knowledge-enabled and plan-based approach to robot programming and control. The vision of the project is that of a cognitive robot that autonomously performs complex everyday manipulation tasks and extends its repertoire of such by acquiring new skills using web-enabled and experience-based learning as well as by observing humans.
The aim of TOMSY is to enable a generational leap in the techniques and scalability of motion synthesis algorithms. We propose to do this by learning and exploiting appropriate topological representations and testing them on challenging domains of flexible, multi-object manipulation and close contact robot control and computer animation. Traditional motion planning algorithms have struggled to cope with both the dimensionality of the state and action space and generalisability of solutions in such domains. This proposal builds on existing geometric notions of topological metrics and uses data driven methods to discover multi-scale mappings that capture key invariances - blending between symbolic, discrete and continuous latent space representations. We will develop methods for sensing, planning and control using such representations.
We propose to use computational topology, which takes notions from algebraic topology and adapts and extends them into more algorithmic forms, to enrich the study of the dynamics of multi-scale complex systems. With the algorithmic approach, we are able to consider inverse problems, such as reconstructing dynamical behaviorus from discrete point samples. This is the right approach to take for complex systems, where the precise behaviour is difficult if not impossible to analyse analytically.
The aim of GRASP is the design of a cognitive system capable of performing grasping and manipulation tasks in open-ended environments, dealing with novelty, uncertainty and unforeseen situations. To meet the aim of the project, studying the problem of object manipulation and grasping will provide a theoretical and measurable basis for system design that is valid in both human and artificial systems. This is of utmost importance for the design of artificial cognitive systems that are to be deployed in real environments and interact with humans and other agents. Such systems need the ability to exploit the innate knowledge and self-understanding to gradually develop cognitive capabilities.
The outcomes of RoSy will provide novel functionalities and design principles for embedded, networked and assistive robots from a systems perspective, for their robust and versatile behavior in open-ended environments providing intelligent response in unforeseen situations, and enhancing human-machine interaction. RoSy research will contribute to scientific and industrial communities while also having a clear social dimension, providing technologies that increase life quality.
The main objective of this project is the development of robotic systems for dual arm object manipulation based on visual, range and haptic information. We will address three research problems: i) Task learning based on observation of human examples; ii) A multi-agent control theoretic approach for dual arm manipulation; iii) Sensors and system integration. Contributions beyond the state-of-the art will be made regarding several of the system components providing means for advanced performance of an integrated system.
The aim of the project is to develop a unified theory of self-understanding and self-extension with a convincing instantiation and implementation of this theory in a robot. By self-understanding we mean that the robot has representations of gaps in its knowledge or uncertainty in its beliefs. By self-extension we mean the ability of the robot to extend its own abilities or knowledge by planning learning activities and carrying them out. At KTH we focus on research around two strands; spatial understanding and grasping.
PACO-PLUS brings together an interdisciplinary research team to design and build cognitive robots capable of developing perceptual, behavioural and cognitive categories that can be used, communicated and shared with other humans and artificial agents. To demonstrate our approach we are building robot systems that will display increasingly advanced cognitive capabilities over the course of the programme. They will learn to operate in the real world and to interact and communicate with humans. To do this they must model and reflectively reason about their perceptions and actions in order to learn, act and react appropriately. We hypothesize that such understanding can only be attained by embodied agents and requires the simultaneous consideration of perception and action.