Träd
Definition
Ett träd är en samling noder förbundna på så sätt
att det finns exakt ett sätt att gå från en godtycklig nod
till en annan godtycklig nod, se figur 5.1 på sid 87 i kompendiet.
Till de termer som är definierade i figuren kan läggas följande:
- Två noder som har samma förälder kallas syskon
(tex är I och J syskon i fig 5.1).
- Alla noder från en viss nod och uppåt kallas nodens
förfäder (i fig 5.1 är G, C och A förfäder till
G).
- Alla noder från en viss nod och nedåt kallas nodens
avkomma (i fig 5.1 är G, I och J avkomma till G).
- Ett träds höjd är antal noder (inklusive roten)
på längsta vägen från roten till ett löv. Trädet
i figuren har höjden 4.
- En nods djup är antalet noder (inklusive roten) som passeras
på väg från noden till roten. Noden J i figuren har djupet
3.
Exempel på trädstrukturer "i verkligheten" är släkträd,
innehållsförteckningen i en bok (boken består av kapitel
som består av avsnitt som i sin tur kan bestå av "underavsnitt")
och filsystemet i ett operativsystem (varje katalog kan innehålla filer
och andra kataloger).
Ordnat träd
Ett träd är ordnat om syskon ligger i en viss ordning i
förhållande till varandra (mao, ett ordnat träd består
av en rot och en sekvens
av subträd som även de är ordnade träd). Exempel på
detta är de parsträd kompilatorer bygger, se nedan.
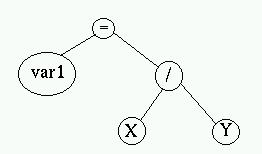
Trädet i bilden ovan beskriver instruktionen var1 = X / Y;
. Trädet måste vara ordnat eftersom det har betydelse i vilken
ordning noderna läses (var1 = Y / X; betyder något helt
annat).
Binärt träd
Ett binärt träd är ett träd där en nod kan
ha högst två barn, ett vänsterbarn och ett högerbarn
.
Binärt sökträd
Definition: I ett binärt sökträd är noderna
sorterade på så sätt att för alla noder X i trädet
är alla värden i det vänstra subträdet mindre än
värdet i X och alla värden i det högra subträdet större
än värdet i X. Figur 5.2 på sid 88 är ett exempel
på ett binärt sökträd och figur 5.4 på sid 89
är ett exempel på ett träd som inte är ett binärt
sökträd. Anledningen till att ha en datastruktur med sorterade
element kan vara att det ska gå snabbt att hitta ett visst element
eller att vi vill läsa alla element i ordningsföljd. Vanligtvis
är värdet i en nod inte det sparade elementet utan en nyckel till
elementet. Om varje nod innehåller till exempel data om en person kan
personnumret vara nyckeln.
Notera att definitionen ovan inte tillåter dubletter, dvs det
får inte finnas två likadana nycklar. Definitionen skulle kunna
utökas till att tillåta likadana nycklar men det är oftast
bättre att lagra element med samma nyckel i samma nod (till exempel
i en lista).
Operationer på binära sökträd
För att förenkla koden i vårt trädbibliotek hanterar
det bara nycklar, det går inte att spara något element i en nod.Vi
ska kunna söka efter största, minsta och en godtycklig nod samt
ta bort en nod och lägga till en nod. Så här definierar vi
dessa operationer:
- struct Node* search(KeyElement key)
precondition: Ingen
postcondition: Trädet är oförändrat.
returnerar: En pekare till noden med den sökta nyckeln om den
fanns i trädet, annars NULL.
- struct Node* min()
precondition: Ingen
postcondition: Trädet är oförändrat.
returnerar: En pekare till noden med den minsta nyckeln eller NULL
om trädet är tomt.
- struct Node* max()
precondition: Ingen
postcondition: Trädet är oförändrat.
returnerar: En pekare till noden med den största nyckeln eller
NULL om trädet är tomt.
- int insert(KeyElement key)
precondition: Ingen
postcondition: Trädet oförändrat förutom att
en nod med nyckeln key är inlagd. Trädet är fortfarande
ett binärt sökträd.
returnerar: 0 om operationen lyckas (nyckeln key fanns inte
i trädet) annars -1 (nyckeln key fanns redan i trädet).
- int remove(KeyElement key)
precondition: Ingen
postcondition: Trädet oförändrat förutom att
en noden med nyckeln key är borttagen. Trädet är fortfarande
ett binärt sökträd.
returnerar: 0 om operationen lyckas (nyckeln key fanns i
trädet) annars -1 (nyckeln key fanns inte i trädet).
Dessutom skriver vi metoder för att traverserva hela trädet (dvs
läsa alla noder). Dessa får samma definition som för en
lista
:
- void beforeFirst()
precondition: ingen
postcondition: trädet oförändrat
Placerar cursorn först i trädet.
- struct Node* next()
precondition: ingen
postcondition: trädet oförändrat
returnerar: Elementet i trädet efter det som senast returnerades.
- bool hasNext()
precondition: ingen
postcondition: trädet oförändrat
returnerar: true om det finns fler element i trädet,
annars false.
Här kommer denna definition, BinarySearchTree.h
. Notera metoderna returnerar en pekare till en nod i listan. Detta betyder
att definitionen av en nod blir publik i motsats till i våra tidigare
datastrukturer. Är inte detta dåligt? Jo, det har nackdelar: det
går inte att ändra nodens definition och det går inte att
skriva om implementationen till att använda en array (vilket i och för
sig knappast blir aktuellt). Fördelen är att användaren får
ut ett helt subträd eftersom noden även innehåller länkar
till dess barn. Om vi inte returnerade en nod skulle det vara svårt
att få tag i ett subträd. Dessutom blir koden lättare om
vi returnerar hela noder.
Implementation av binärt sökträd
Här är hela implementationen, BinarySearchTree.c
, och ett testprogram för den, TestBinarySearchTree.c
. Låt oss nu titta på den bit för bit. Från
headerfilen
hämtar vi definitionen av en nod:
struct Node {
KeyElement key;
struct Node* parent;
struct Node* leftChild;
struct Node* rightChild;
};
Den innehåller en nyckel och en pekare till sina två barn. Dessutom
innehåller den en pekare till sin förälder. Den behövs
för att kunna implementera metoden next() effektivt. Hade vi
inte metoder för iterering skulle pekaren till föräldern ha
kunnat utlämnas.
Nu deklarerar vi själva trädet:
struct Node* root = NULL;
Det enda vi behöver hålla reda på är roten. Den innehåller
pekare till sina barn som har pekare till sina barn osv.
Så över till operationerna. Vi börjar med min()
som ska returnera noden med minst nyckel. Den hittar vi genom att hela tiden
gå nedåt till vänster (vänster barn är alltid
mindre än aktuell nod). Vi returnerar noden längst ner till vänster.
min() anropar bara en privat metod _min(struct Node* n)
som gör hela jobbet. Det är därför att _min()
kommer att användas av andra publika metoder som inte ska söka
från roten. Däremot ska användaren av vårat bibliotek
inte behöva hålla reda på trädets rot, så vi
kan inte låta min() ta en nod som inparemeter.
struct Node* min() {
return _min(root);
}
struct Node* _min(struct Node* n) {
struct Node* min = n;
while (min->leftChild != NULL) {
min = min->leftChild;
}
return min;
}
Sedan tar vi max(), den fungerar precis som min() men vi
går år höger hela tiden.
struct Node* max() {
return _max(root);
}
struct Node* _max(struct Node* n) {
struct Node* max = n;
while (max->rightChild != NULL) {
max = max->rightChild;
}
return max;
}
Notera hur lätt det är att hitta minsta respektive största
elementet. Hade datastrukturen varit osorterad skulle det varit nödvändigt
att läsa alla element för att veta vilket som var minst eller
störst.
Så var det dags för traverseringen. Det finns tre olika sätt
att traversera ett binärt träd:
- Inorder Besök först en nods vänstra barn, sedan
noden själv och sist nodens högra barn.
- Preorder Besök först noden själv, sedan dess
vänstra barn och sist dess högra barn.
- Postorder Besök först nodens vänstra barn, sedan
dess högra barn och sist noden själv.
Dessa traverseringsordningar förklaras tydligare i figur 5.5 på
sid 90 och tabellen överst på sid 91. Vi väljer inorder för
vår traversering eftersom det innebär att nycklarna kommer ut
sorterade (i stigande ordning). Först skriver vi beforeFirst()
:
void beforeFirst() {
cursor = min();
}
Det första elelementet är det minsta. Cursorn pekar nu i och för
sig på det minsta elementet, inte före det. Detta spelar ingen
som helst roll bara operationerna fungerar enligt definitionen: Om beforeFirst()
anropas först kommer nästa anrop av next() att returnera
det första elementet.
Nu tittar vi på next(). Den ska hitta noden som är
närmast större än cursor. Eftersom det inorder traversering
ska vi till höger barn efter att ha varit i aktuell nod. Detta görs
med raderna
if (cursor->rightChild != NULL) {
next = cursor->rightChild;
Nu är vi nere i det högra barnet. Den minsta noden under det är
dess nedersta vänstra avkomma, den hittar vi med raden
next = _min(next);
Så var det klart. Det andra fallet är om aktuell nod inte har
något högerbarn. Då måste vi upp till dess förälder
i stället.
} else {
next = cursor->parent;
Om vi kom från ett vänsterbarn upp till föräldern har
vi hittat nästa nod eftersom inorder betyder att efter vänstra barnet
kommer föräldern. Om vi däremot kom från ett högerbarn
hade vi redan varit i föräldern. Vi måste då vidare
upp tills vi når en nivå där vi kom från ett vänsterbarn.
struct Node* ch = cursor;
while (next != NULL && ch == next->rightChild)
{
ch = next;
next = next->parent;
}
}
Kontrollen next != NULL i while-loopen beror på att
om vi redan besökt alla noder kommer vi att fortsätta hela vägen
upp till roten vars parent är NULL. Nu har vi hittat
nästa nod. Vi returnerar cursor och uppdaterar den till att
peka på nästa nod.
struct Node* current = cursor;
cursor = next;
return current;
Pust! Nu är vi klara med next().
Lyckligtvis är hasNext() betydligt enklare. Traverseringen
är slut om cursor är NULL. Vi har då gått igenom hela
trädet och kommit till rotens förälder, se next()
.
bool hasNext() {
return cursor != NULL;
}
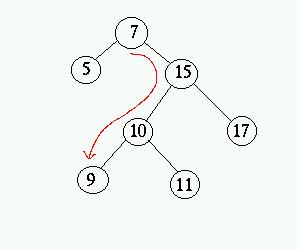
Sökning efter ett visst element sker genom att alltid jämföra
värdet i aktuell nod med det sökta elementet. Om de är lika
har vi hittat den sökta noden, om det sökta elementet är mindre
än det i aktuell nod går vi ned till det vänstra barnet och
om det sökta elementet är större går vi ned åt
höger. Bilden nedan visar den väg search() tar för
att hitta noden med nyckeln 9.
insert() fungerar på nästan samma sätt som
search(). Först söker den efter en nod med den nyckeln som
ska läggas in. Hittas en sådan nod kan den nya noden inte läggas
in eftersom det inte får finnas dubletter. Om det inte finns någon
nod med den nya nyckeln läggs den nya noden in där sökningen
returnerade NULL. Detta innebär att trädet fortfarande
är ett binärt sökträd eftersom vi sökt ut positionen
enligt reglerna för att bonärt sökträd. Notera att detta
innebär att nya noder alltid blir löv. I bilden nedan visas en
sökning efter en nod med nyckeln 12. En sådan finns inte vilket
innebär att en ny nod med nyckeln 12 kan läggas in där sökningen
returnerar NULL.
Lägg märke till hur mycket mer kod det är i operationen
insert() än i search(). Det beror till stor del på
att insert() är iterativ medans search() är rekursiv.
Slutligen återstår operationen remove() som dessvärre
är den krångligast av alla. Först söker vi efter en nod
med den nyckel som ska tas bort (på samma sätt som i search()
). Därefter sönderfaller algoritmen i tre olika fall:
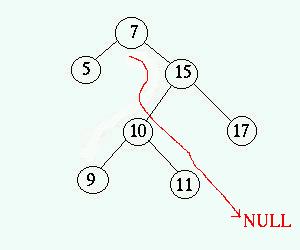
- Noden som ska tas bort är ett löv
Det är bara att ta bort noden och sätta förälderns pekare
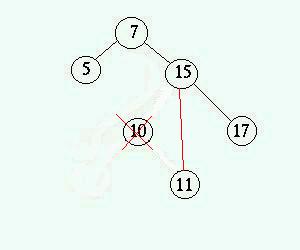
som tidigare pekade ut noden till NULL. - Noden som ska tas
bort har ett barn
Förälderns pekare som tidigare pekade ut noden ändras till
att peka på barnet varefter noden tas bort. Bilderna nedan visar hur
noden 10 tas bort ur trädet.
- Noden som ska tas bort har två barn
- Tilldela noden värdet av den minsta noden i dess högra subträd.
Denna är den med närmast högre värde än den som ska
tas bort. Högre värde eftersom den ligger nedåt till höger,
närmast högre eftersom det är den minsta i det högra
subträdet. På detta vis är noderna fortfarande rätt
sorterade.
- Tag bort den nod vars värde kopierades (den minsta till höger).
Detta måste vara enligt fall ett eller två eftersom den inte kan
ha något vänsterbarn (detta skulle varit ännu mindre). Bilderna
nedan visar hur noden 5 tas bort.
Prestanda för implementationen
- Vad gäller traverseringen finns det flera alternativa implementationer.
Olika datastrukturer, till exempel en länkad lista, där elementen
är sorterade kan byggas redan vid beforeFirst(). Sedan hämtas
elementen vid traversering ur den. Detta gör traverseringen klart långsammare
medans många andra operationer blir lite snabbare på grund av
att vi slipper pekaren parent.
- Vi kan konstatera att exekveringshastigheten av så gott som
alla operationer är proportionell mot djupet av den nod som hanteras.
Detta innebär att worst case är proportionell mot det nedersta
lövets djup. Kan vi då veta vilken höjd ett visst träd
har? Svaret är att höjden är helt beroende av i vilken ordning
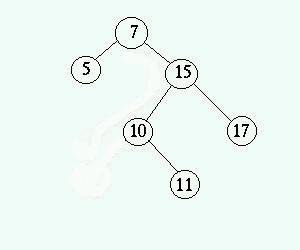
noderna läggs in. Bilderna nedan visar två träd med exakt
samma noder men noderna är inlagda i olika ordning.
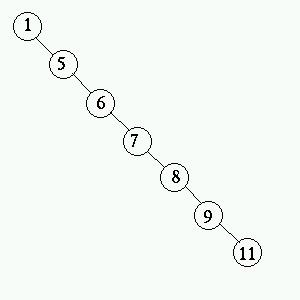
Trädet till vänster kallas balancerat . Trädet till höger
har degenererat till en länkad lista. Detta är de två extremfallen,
det är lätt att inse att de har ganska olika prestanda. Den nedersta
noden i det högra trädet har djupet 6 medans den i det vänstra
har djupet 2. Finns det då något genomsnitt? Mer generellt har
ett balancerat träd ett djup som är största heltalet mindre
än log2 n, där n är antalet noder i trädet.
Ett träd av typen i den högra bilden ovan har djupet n-1. Detta
innebär att trädet till vänster är O(log n) medans trädet
till höger är O(n), en väsentlig skillnad. Det går att
visa att ett träd i genomsnitt har djupet 1,38log n, dvs det är
O(log n).
Det finns olika strategier att stuva om noderna i träd när
nya noder läggs in så att träden ska vara så nära
balancerade som möjligt. Några exempel är AVL-träd, röd-svarta
träd och AA-träd. Gemensamt för dem alla är att insert()
och remove() blir lite långsammare eftersom noderna måste stuvas
om. Eftersom de är väldigt nära balancerade blir djupet ungefär
log n i stället för 1,38log n, dvs ungefär 25% snabbare.