
Doctoral Thesis
Enhancing Geometric Maps Through Environmental Interactions.
FULL TEXT

![]() I am a Robotics and Computer Vision scientist at UNIVRSES in Stockholm where I mostly work on robotics and autonomous driving vision problems.
I am a Robotics and Computer Vision scientist at UNIVRSES in Stockholm where I mostly work on robotics and autonomous driving vision problems.
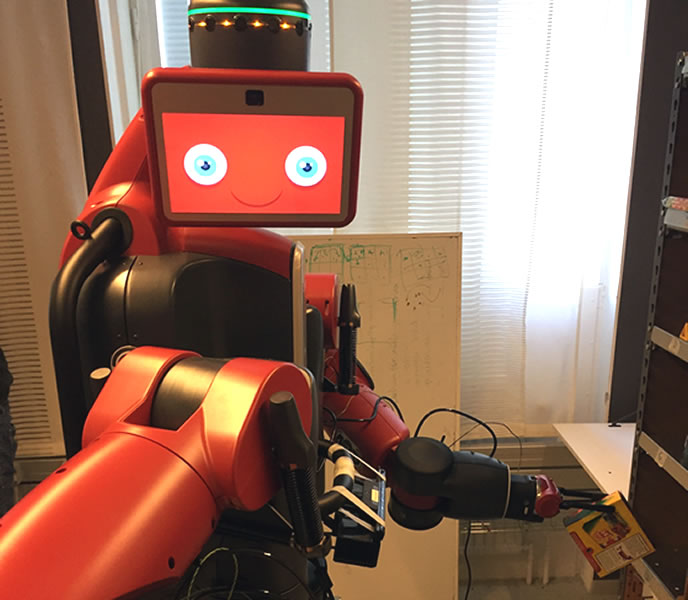
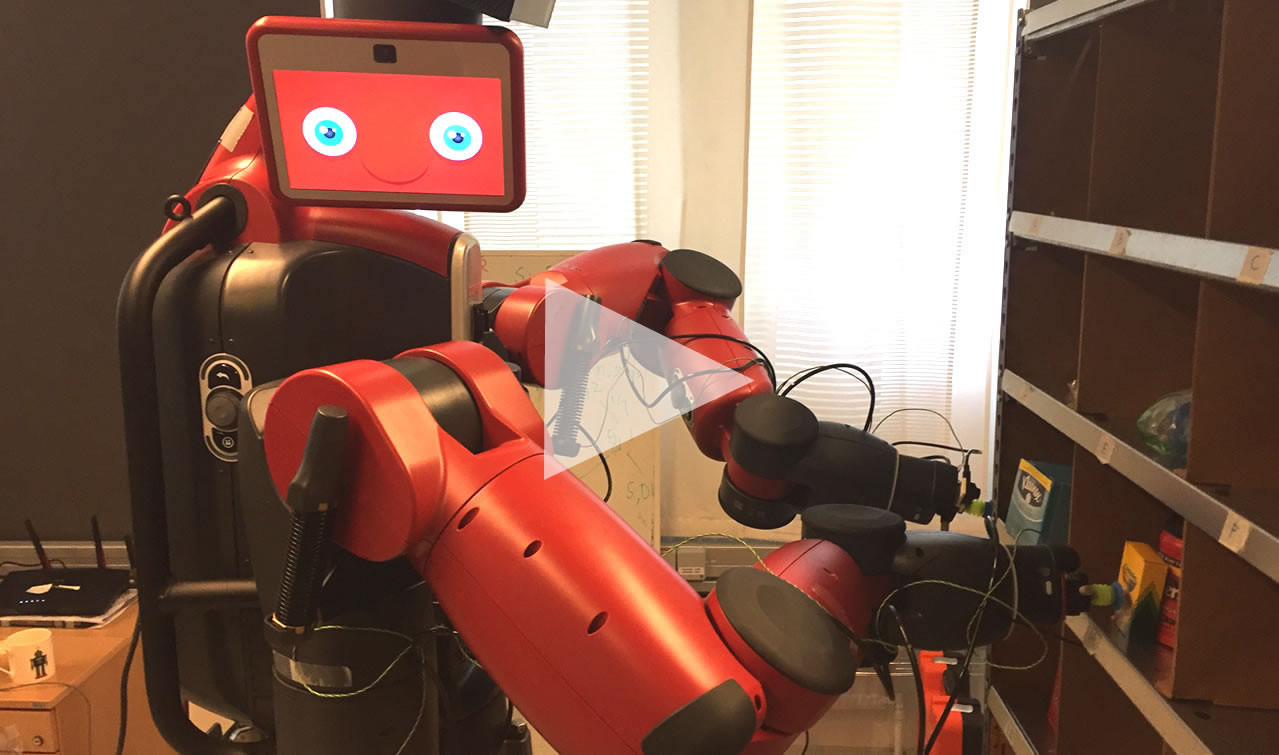
![]() I did my PhD at the Robotics, Perception and Learning Lab (RPL) at KTH Royal Institute of Technology in Sweden. My main research area is robotics perception, specifically I was working on enhancing perception capabilities of field robots (Unmanned Ground Vehicles - UGVs ). My main supervisor is Danica Kragic and co-supervisor Petter Ögren. My research spans in the area of Perception, Computer Vision, Machine Learning and Control.
I did my PhD at the Robotics, Perception and Learning Lab (RPL) at KTH Royal Institute of Technology in Sweden. My main research area is robotics perception, specifically I was working on enhancing perception capabilities of field robots (Unmanned Ground Vehicles - UGVs ). My main supervisor is Danica Kragic and co-supervisor Petter Ögren. My research spans in the area of Perception, Computer Vision, Machine Learning and Control.
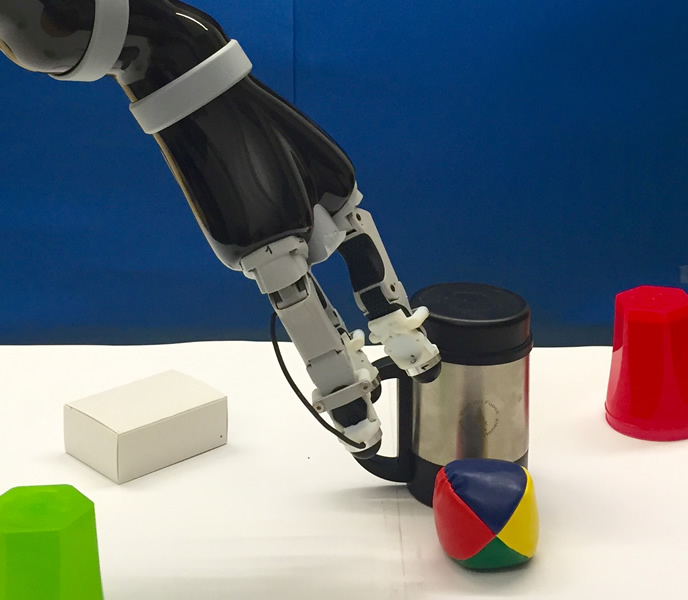
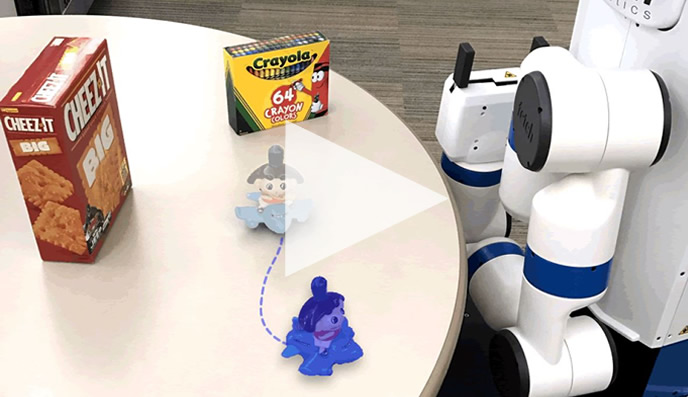
![]() I spent 6 months as Intern at Mitsubishi Electric Research Labs (MERL) in Cambridge MA, US (Oct 2016 - May 2017). At MERL I worked on SLAM problems, objects reconstruction and Deep Learning applications.
I spent 6 months as Intern at Mitsubishi Electric Research Labs (MERL) in Cambridge MA, US (Oct 2016 - May 2017). At MERL I worked on SLAM problems, objects reconstruction and Deep Learning applications.
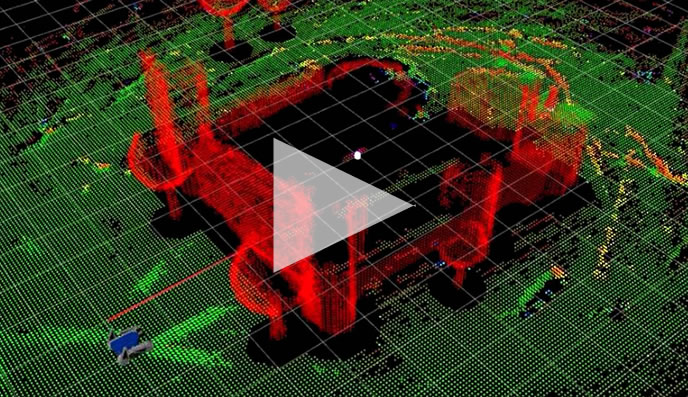
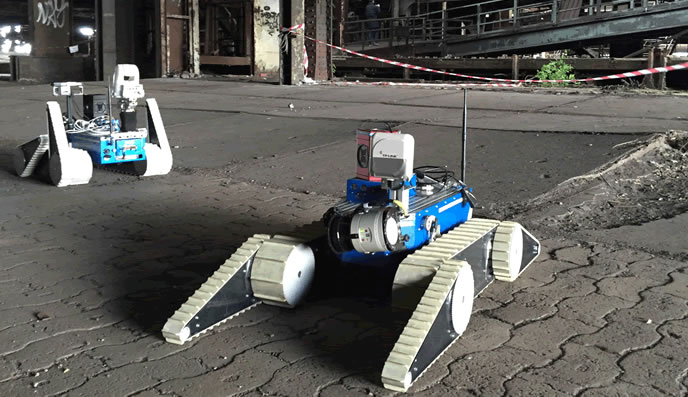
![]() During my PhD studies I was involved in the European project TRADR. In a typical TRADR scenario various kinds of field robots (UGVs and UAVs) explore a wide disaster area and collaborate with human teams (fire-fighters) over multiple asynchronous missions.
During my PhD studies I was involved in the European project TRADR. In a typical TRADR scenario various kinds of field robots (UGVs and UAVs) explore a wide disaster area and collaborate with human teams (fire-fighters) over multiple asynchronous missions.
I was also Marie Curie Researcher (ESR) at Oslo University Hospital for 9 months working on image processing (organ segmentations) and I have been briefly involved in the European projects I3O and EMICAB.





“I, on the other hand, am a finished product. I absorb electrical energy directly and utilize it with an almost one hundred percent efficiency. I am composed of strong metal, am continuously conscious, and can stand extremes of environment easily. These are facts which, with the self-evident proposition that no being can create another being superior to itself, smashes your silly hypothesis to nothing.” - Isaac Asimov, I, Robot.
A small list of main topics of interest and skills.
Here below a list of research topics, publications and projects I have worked with. Description links might be still inactive.
*submitted/accepted to a journal or conference
Enhancing Geometric Maps Through Environmental Interactions.
FULL TEXT
STL file. Dim 176 kB
DOWNLOAD

ROS for Search and Rescue Robotics: Tools and Lessons learned during TRADR.
SLIDES
Joint 3D Reconstruction of a Static Scene and Moving Objects.
READ MORE*
Online WiFi mapping and self-reconnection strategies for mobile robots.
READ MORE*
KTH (RPL) will participate in the Amazon Picking Challenge 2016. I will be responsible and coordinate the perception team.
READ MORE
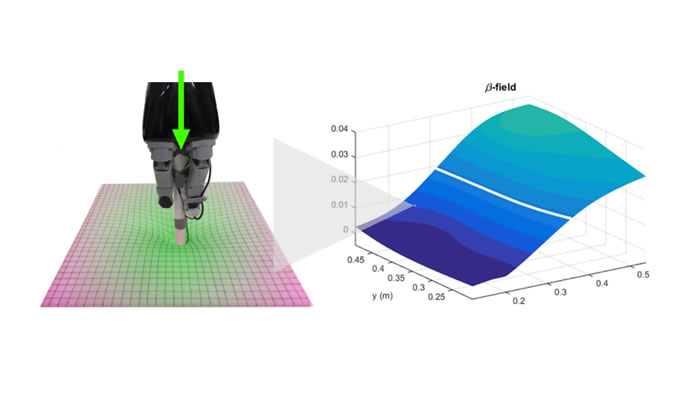
Enhancing environmental perception of non-rigid surfaces using Gaussian Processes.
READ MORE*
Enhancing environmental perception combining visual (RGB-D) and tactile data for object detection.
READ MORE*
Create large scale simulations of field robots using game engines (Unity3D).
READ MORE*

Enhancing perception of wireless connectivity on field robots during teleoperation. IROS 2015
READ MORE*
European FP7 project on collaborative search and rescue robots.
READ MORE
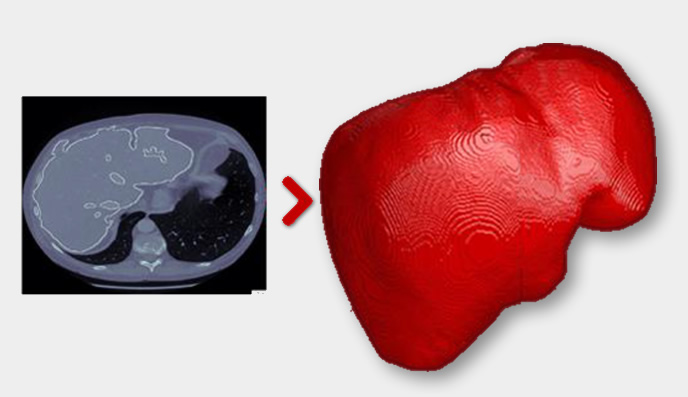
Segmentation of liver, spleen and tumours using linear filtering on 3D structures.
READ MORE*
A computational model for motor learning in insects using echo state recurrent networks. IJCNN 2013
READ MORE*
